随着汽车智能化与网联化浪潮的推进,电子电气架构(EEA)正经历从传统分布式向集中式的深刻变革。网络技术作为电子电气架构的核心支撑,其发展直接决定了智能网联汽车的性能、安全与扩展能力。本文将从网络拓扑、通信协议及关键技术三个维度,系统阐述智能网联汽车电子电气架构中的网络技术。
一、网络拓扑演进:从分布式到域集中
传统汽车电子电气架构采用分布式控制单元(ECU)通过低速总线(如LIN、CAN)连接,存在布线复杂、带宽受限等痛点。智能网联汽车则逐步转向域集中架构,按功能划分为动力域、车身域、信息娱乐域、自动驾驶域等,通过高速以太网骨干网实现域间互联。未来将进一步向车辆集中架构(如“中央计算单元+区域控制器”)演进,通过冗余网络设计提升系统可靠性。
二、通信协议分层:多速率协同传输
为满足不同场景的通信需求,智能网联汽车采用分层协议栈:
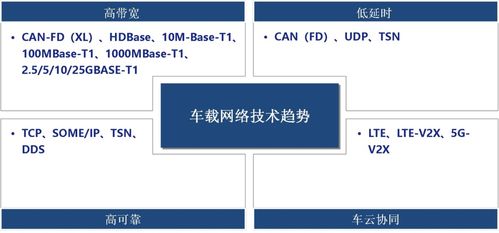
- 底层传感器层:采用CAN-FD、FlexRay等高实时性协议,用于刹车、转向等安全关键系统。
- 多媒体传输层:基于车载以太网(如100BASE-T1)支撑高清摄像头、雷达数据流传输。
- 云端交互层:通过5G/V2X技术实现车与云、车与路侧设备的低延迟通信,支持OTA升级与协同感知。
三、关键技术突破:TSN与安全机制
- 时间敏感网络(TSN):通过时间同步、流量调度等技术,保障自动驾驶数据在以太网中的确定性传输,解决传统IP网络“尽力而为”的延迟隐患。
- 网络安全防护:建立硬件安全模块(HSM)、防火墙与入侵检测系统,防范针对车载网络的恶意攻击,符合ISO/SAE 21434标准要求。
- 软件定义网络(SDN):通过控制器动态配置网络资源,实现功能服务的灵活部署与故障隔离。
四、挑战与趋势
当前智能网联汽车网络仍面临异构协议兼容性、电磁兼容性(EMC)设计、功能安全(ISO 26262)与信息安全协同等挑战。未来将呈现三大趋势:一是向10G车载以太网演进,支持L4级以上自动驾驶数据吞吐;二是构建基于服务的通信(SOME/IP)架构,实现软硬件解耦;三是融合边缘计算与车云一体网络,形成“端-边-云”协同的算力底座。
网络技术如同智能网联汽车的“神经网络”,其革新不仅推动电子电气架构向集中化、标准化发展,更为高阶自动驾驶、智慧交通等场景落地奠定基础。下一篇章将深入探讨电子电气架构中计算平台与软件架构的技术演进。









